
Источник: Новости высоких технологий
Современные прямоходящие роботы уже достаточно неплохо могут сохранять равновесие при ходьбе.
Но это справедливо лишь для ровной поверхности. При наличии неровностей двуногие роботы начинают спотыкаться и падать, и даже самые современные системы стабилизации не всегда спасают их от этого.
Но исследователи из Технологического университета Гуандуна (Китай) нашли весьма элегантное решение вышеописанной проблемы.
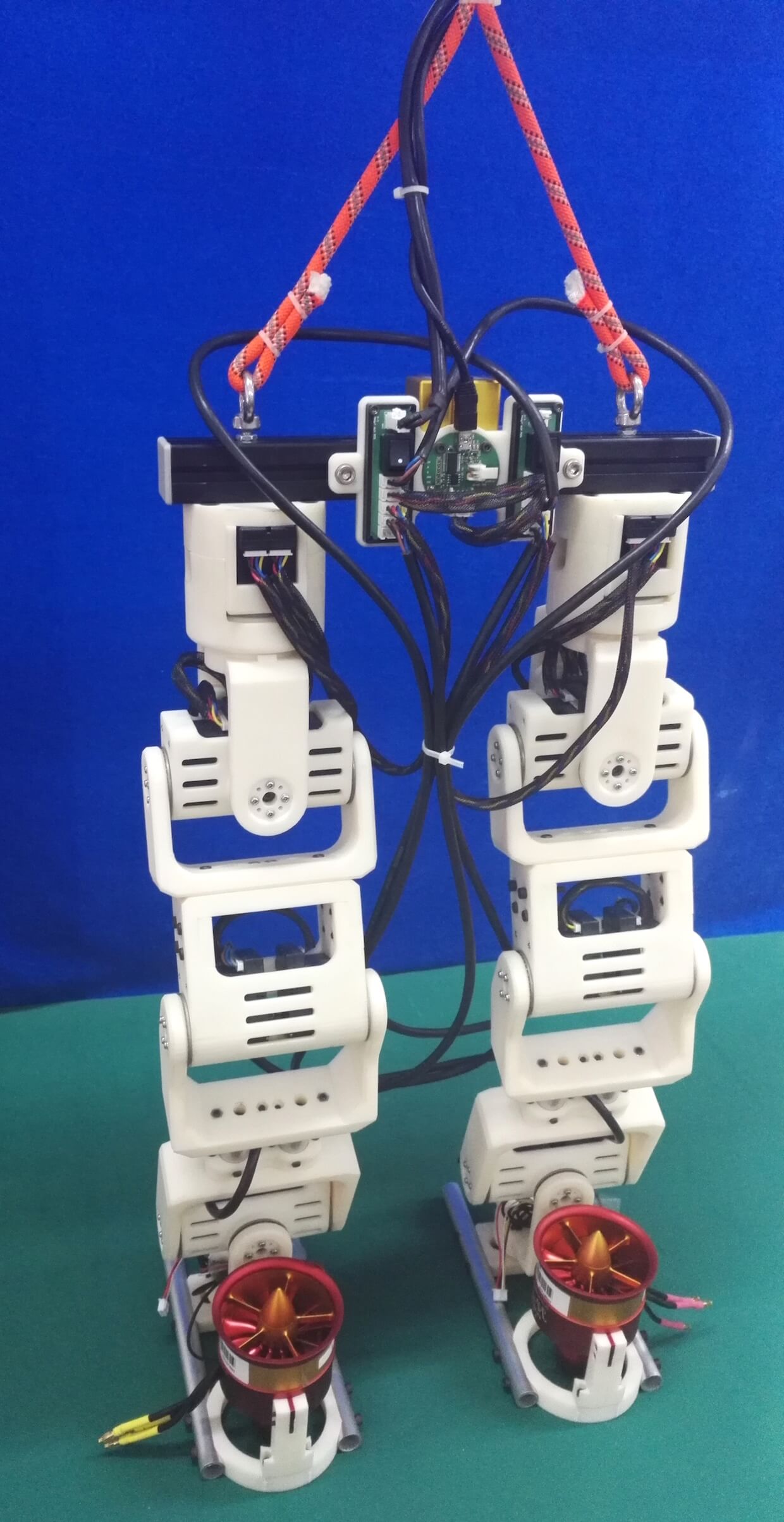
Они решили использовать пропеллеры на ногах робота, которые помогут сохранить равновесие даже в самых непростых условиях.
Робот с пропеллерами получил название Jet-HR1, а основной функцией роторов, по заверению разработчиков, является частичная компенсация смещения центра тяжести, что позволяет роботу совершать довольно широкие шаги без шанса свалиться на бок.
Робот Jet-HR1 имеет высоту в 65 сантиметров, а вес 6,5 килограммов, при этом каждый пропеллер способен поднять вес до 2 килограммов, что вместе с системой стабилизации дает очень хорошие результаты.
В ходе серии экспериментов робот переступил через препятствие шириной 37 сантиметров, что составляет 80 процентов от максимально возможной длины шага робота.
При ходьбе каждый пропеллер разгоняется до максимальной скорости, удерживая ногу в вертикальном положении и не давая роботу завалиться.
При этом вентилятор на «задней» ноге, которая остается позади во время ходьбы, вращается в обратную сторону, прижимая Jet-HR1 к земле и обеспечивая тем самым дополнительную устойчивость.
После того как робот ставит «переднюю» ногу на поверхность, пропеллеры меняют направление вращения так, чтобы «передняя» нога притягивалась, а «задняя» отталкивалась.
 Самые актуальные новости - в
Самые актуальные новости - в 




