Источник: ITC.ua
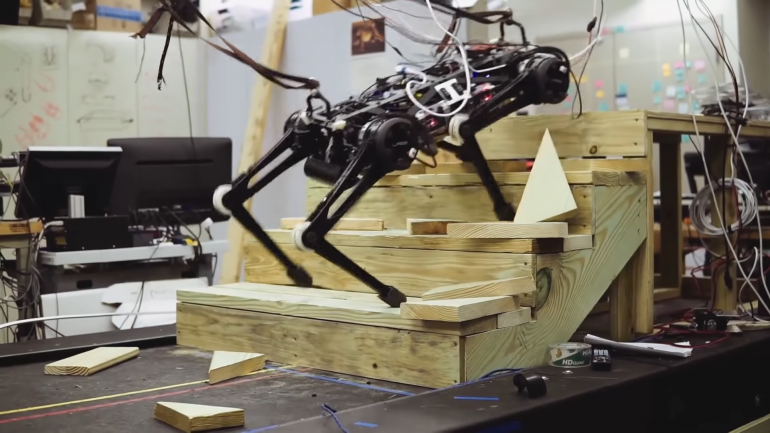
Группа исследователей из MIT создала четырехногого робота Cheetah 3, который способен ходить, бегать, прыгать, подниматься по лестнице и сохранять равновесие при внешних воздействиях.
При этом устройство лишено камер, а благодаря новым алгоритмам оно способно перемещаться и выполнять различные действия в окружающей среде на ощупь.
Команда считает, что полагаясь на визуальное восприятие окружающего пространства, робот может замедлить робота или заставить его споткнуться, если камера не увидит препятствие.
Потому исследователи хотят научить робота двигаться вслепую.
Это может быть полезно, если робота нужно отправить в такие участки, куда не могут направиться люди, например, в недра электростанции.
После аварии на атомной электростанции Фукусима радиационное излучение привело в негодность камеру на роботе, отправленном для сбора ядерного топлива.
У Cheetah 3 не возникнет проблем в такой ситуации.
«Опасную, грязную и трудную работу можно сделать гораздо безопаснее с помощью роботов с дистанционным управлением» — говорит один из участников проекта.
В итоге, команда оснастила Cheetah 3 новыми алгоритмами и сенсорами, чтобы дать ему ощущение тела в космосе.
Обновлённая платформа также включает улучшенную аппаратную часть, которая теперь способна вытягиваться и скручиваться.
Новые предиктивные алгоритмы позволяют Cheetah 3 изменять походку в соответствии с изменениями окружающей обстановки, чтобы сохранять равновесие.
 Самые актуальные новости - в
Самые актуальные новости - в