Инженеры из Университета Карнеги – Меллона в сотрудничестве со специалистами из Миннесотского университета совершили настоящий прорыв в области разработки неивазивных методов управления роботизированным устройством. Используя неинвазивный нейрокомпьютерный интерфейс (BCI) ученые создали первую в мире роботизированную руку, управляемую человеческим мозгом и обладающую возможностью следить за направлением курсора мыши на экране компьютера. Как отмечает портал Tech Explore, сообщающий о разработке, возможность использования неинвазивного метода управления роботизированными устройствами будет иметь широкий спектр применений. Например, данная технологий может оказаться очень полезной для парализованных людей.

Недостатки современных нейрокомпьютерных интерфейсов
В прошлом нейрокомпьютерные интерфесы уже показывали весьма высокую точность управления роботизированными объектами, однако для этого использовались специальные имплантаты, которые вживлялись в мозг человека и отслеживали нужные сигналы. Внедрение этих имплантатов – весьма сложная и довольно опасная задача, требующая хирургического вмешательства. Помимо этого, такие устройства очень дорого стоят, а на деле могут оказаться весьма ограниченными в своих возможностях. Поэтому подобные механизмы применяются в очень редких случаях.
Одной из основных текущих задач сферы разработки нейрокомпьютерных интерфейсов является создание менее инвазивных, а лучше – полностью неинвазивных технологий, которые позволят парализованным людям управлять своим окружением или роботизированными конечностями силой своих мыслей, чем помогут миллионам человек по всему миру улучшить качество своей жизни.
Проблема заключается в том, что использование неинвазивных нейрокомпьютерных интерфейсов, которые собирают информацию о сигналах мозга через внешние электроды, а не через имплантируемые в мозг чипы, сопровождается передачей вместе сигналами мозга количества «шума», который снижает точность управления. Поэтому неивазивные методы мысленного управления роботизированными устройствами сильно проигрывают технологиям с использованием имплантатов. Несмотря на это, разработчики не сдаются и пытаются создать более точные методы управления, которые не будут требовать хирургического вмешательства.
И, похоже, заведующему кафедрой биомедицинской инженерии Университета Карнеги – Меллона, профессору Бину Хе это удалось.
«В сфере разработки роботизированных устройств с управлением силой мысли через специальные мозговые имплантаты достигнуты значительные успехи. Это действительно так. Однако ключевой целью подобных разработок является создание неинвазивных методов. Достижения в области нейронного декодирования и практическая полезность неинвазивного контроля роботизированными руками окажут важнейшее влияние на развитие неинвазивной нейробиотики», — комментирует Хе.
Первая в мире управляемая силой мысли роботизированная рука
Используя новые методы сенсорных технологий и машинного обучения Хе вместе со своей командой смог получить доступ к глубинным сигналам мозга, достигнув высокой точности управления роборукой. Благодаря неинвазивной нейровизуализации и новой парадигме непрерывного преследования, система научилась преодолевать шумные сигналы ЭЭГ, что привело к значительному улучшению нейронного декодирования и облегчило непрерывное управление роботизированными устройствами в режиме реального времени.
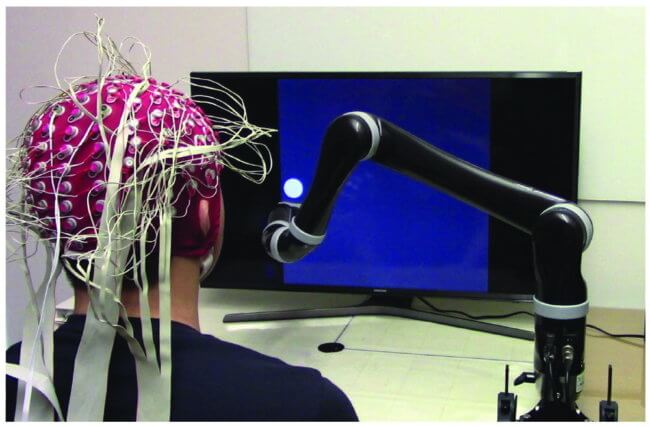
Используя неинвазивный BCI для управления роботизированной рукой, которая отслеживает курсор на экране компьютера, Хе с командой впервые продемонстрировал, что манипулятор теперь может непрерывно следовать за курсором. Ранее подобные устройства следовали за движением курсора резкими, дискретными движениями, как будто пытались «догнать» команды мозга – теперь конечность следует за курсором плавно и непрерывно.
В статье, опубликованной в журнале Science Robotics, команда описывает создание новой платформы, которая направлена на улучшение «мозговых» и «компьютерных» компонентов BCI за счет повышения вовлеченности пользователей и их обучения, а также усовершенствования пространственного разрешения неинвазивных нейронных данных посредством визуализации источников ЭЭГ.
В статье указано, что уникальный подход команды к решению этой проблемы улучшил систему обучения BCI почти на 60 процентов для традиционных задач центрирования, а также повысил качество непрерывного отслеживания компьютерного курсора более чем на 500 процентов.
К настоящему моменту система была проверена с участием 68 работоспособных людей (до 10 сеансов для каждого), людях (до 10 сеансов для каждого субъекта), включая управление виртуальным устройством и управление роботизированной рукой для непрерывного преследования. Клинические испытания технологии с участием настоящих пациентов ученые планируют начать проводить в самом ближайшем будущем.