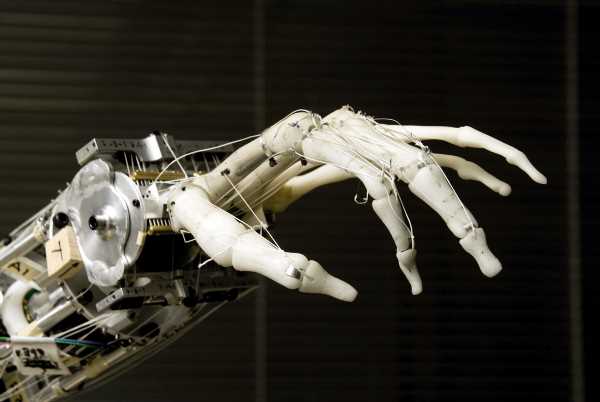
Продемонстрирован прототип магнитного устройства, способного имитировать чувствительность пальцев человека и снабдить роботов точными тактильными сигналами.
Снабдить роботов осязанием оказалось куда сложнее, чем зрением и слухом. Между тем именно это чувство позволяет людям ощущать не только форму и вес предметов, но и текстуры. Такая информация помогает манипулировать объектами с высокой точностью и аккуратностью, адаптируясь к новым ситуациям «на лету» — со скоростью, недоступной даже лучшим современным роботам.
Стараясь сделать роботов более ловкими, разработчики из разных стран стремятся воспроизвести чувствительность подушечек человеческих пальцев в искусственных системах. Новый прототип такого устройства представила команда разработчиков из Китая и США во главе с Цзя Панем (Jia Pan) из Гонконгского университета, их статья опубликована в журнале Science Robotics.
Роль чувствительных «подушечек» с папиллярными линиями играет тонкая (около 0,5 миллиметра) и гибкая магнитная пленка. Прикосновения и давление заставляют ее деформироваться, а расположенные глубже датчики регистрируют вызванные этим слабые изменения магнитного поля.

Движение такого «пальца» по неровной поверхности побуждают вибрировать магнитную пленку, вызывая характерные колебания магнитного поля. Для анализа сигналов с датчиков используется нейросеть. Она позволяет определять не только место и силу соприкосновения, но и сдвиговые силы — а значит, ощущать текстуру поверхности, по которой совершается движение, с высоким разрешением.
Гибкий пневматический робот умеет ходить и осязать без электронных микросхем и датчиков
Инженеры из Калифорнии сконструировали полностью пневматического робота, который использует сжатый воздух и надежную систему клапанов для перемещения ног и контроля за движением.
naked-science.ru
Авторы работы продемонстрировали, как роботизированная рука, получая обратную связь от таких магнитных «подушечек пальцев», точно меняет силу своего хвата и стабильно удерживает наполняющуюся водой бутылку с постепенно увеличивающейся массой.
Источник: Naked Science
 Самые актуальные новости - в
Самые актуальные новости - в